KUZGUN II.Variable sweepcombat UAV.
8 kg variable sweep autonomous combat UAV that adapts its wings mid-flight. Built to strike at 210 km/h, detect targets with YOLOv26s, and operate entirely without human input.
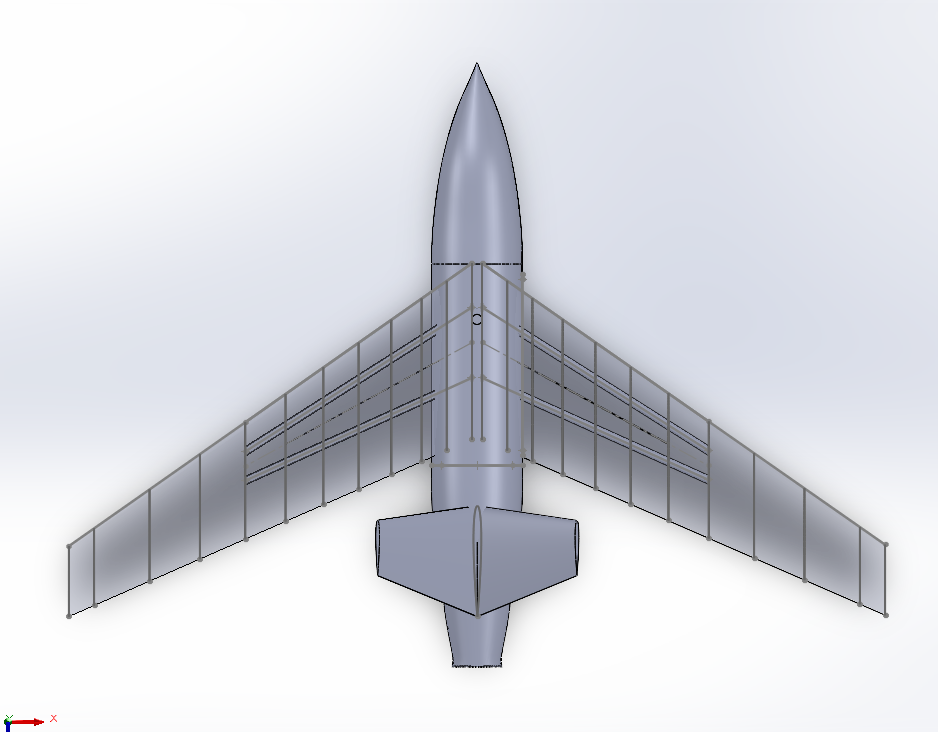
Variable sweep wing.
Same competition, new airframe. Wings that change angle mid-flight — back for high-speed dashes, forward for slow-speed loiter.
Year 2 is an evolution of the KUZGUN platform — same competition, new airframe. I've made massive progress on the variable sweep wing UAV that can change wing angle mid-flight. Wings swept back for high-speed dashes and dogfighting, wings forward for slow-speed loiter and precision maneuvers.
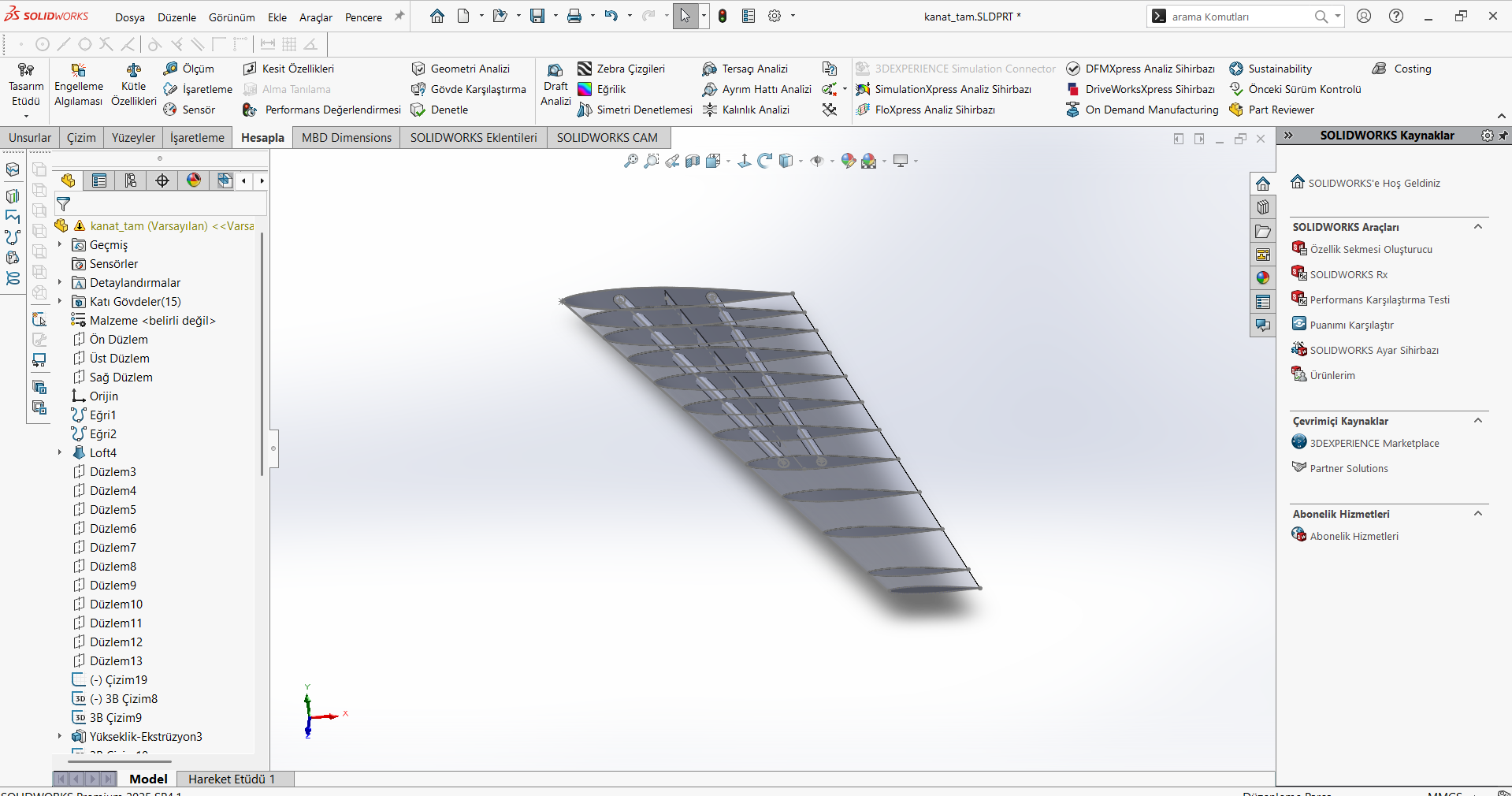
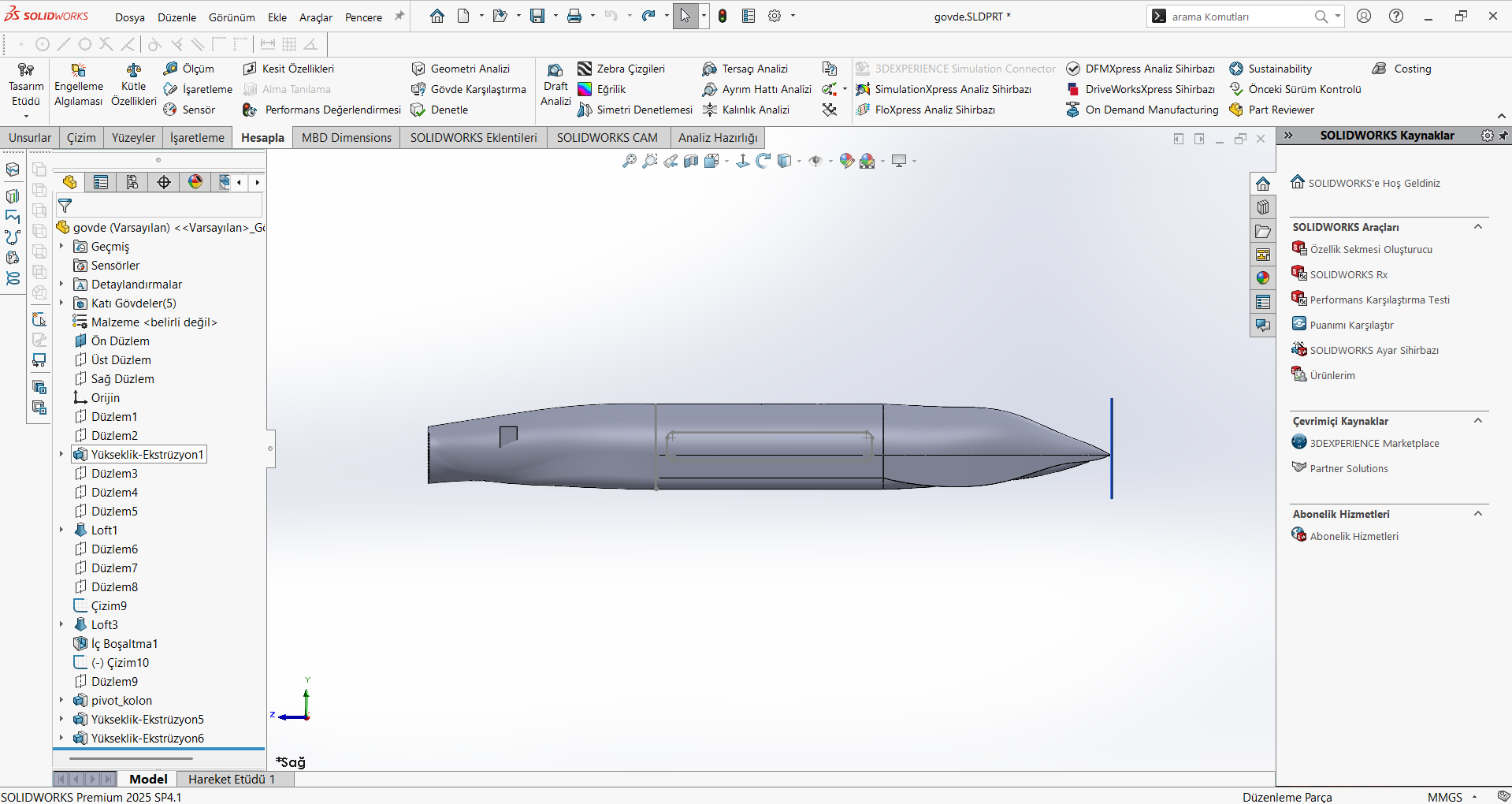
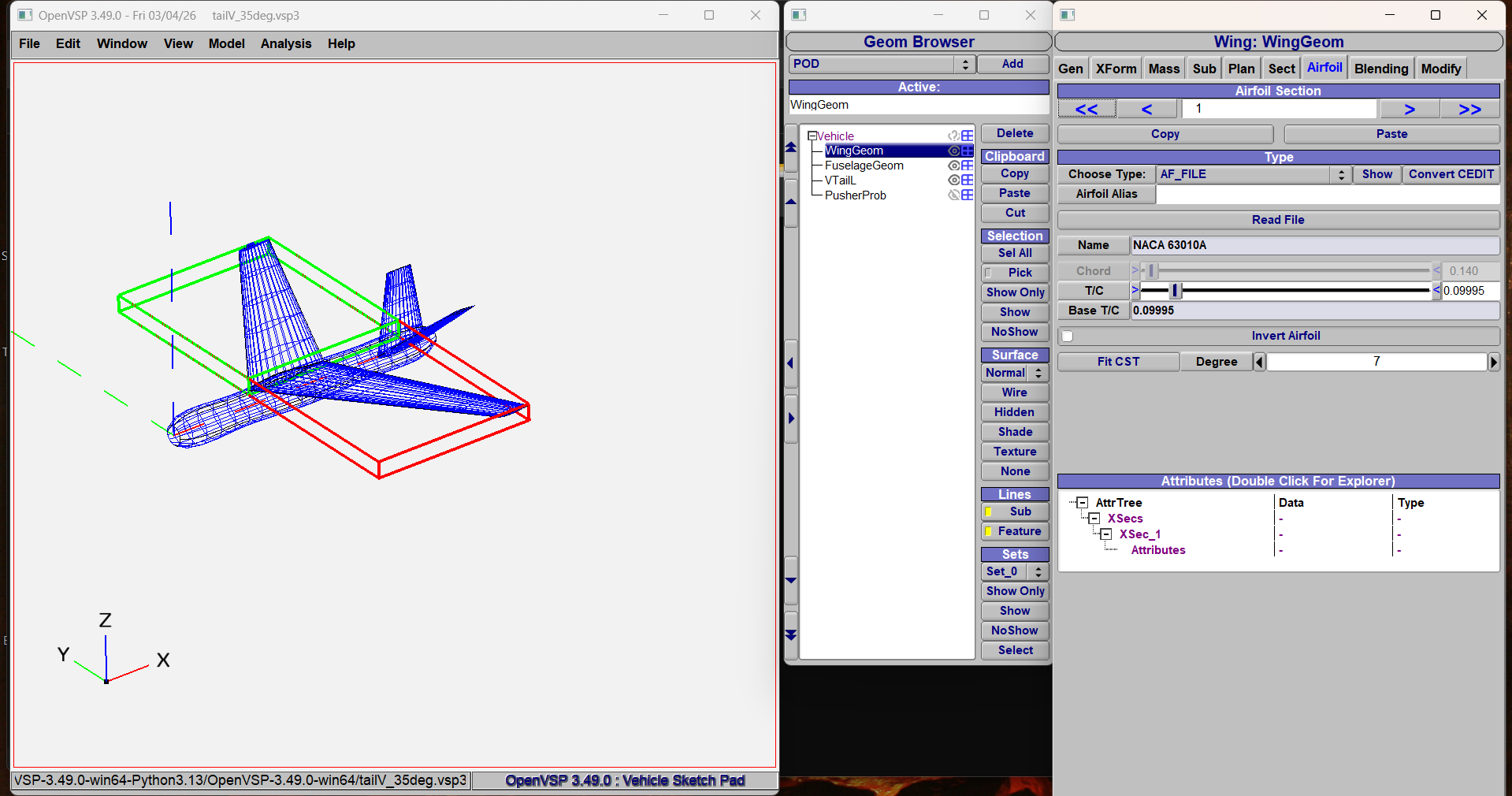
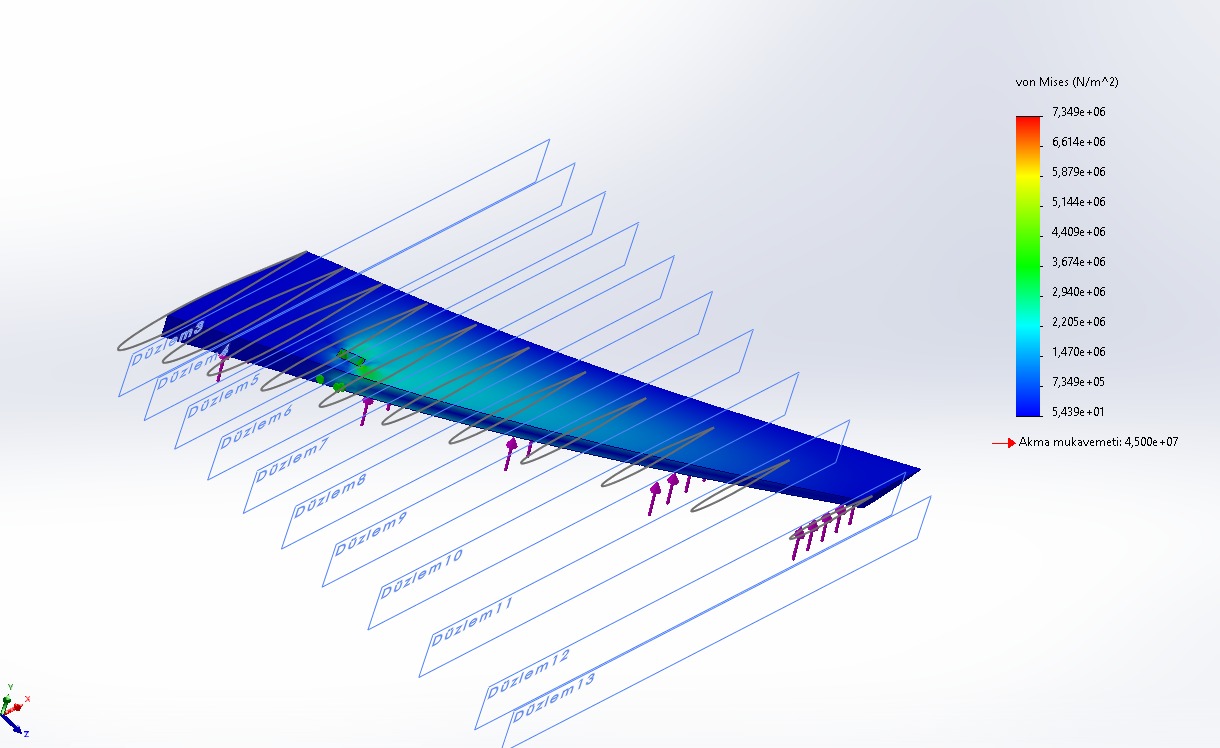
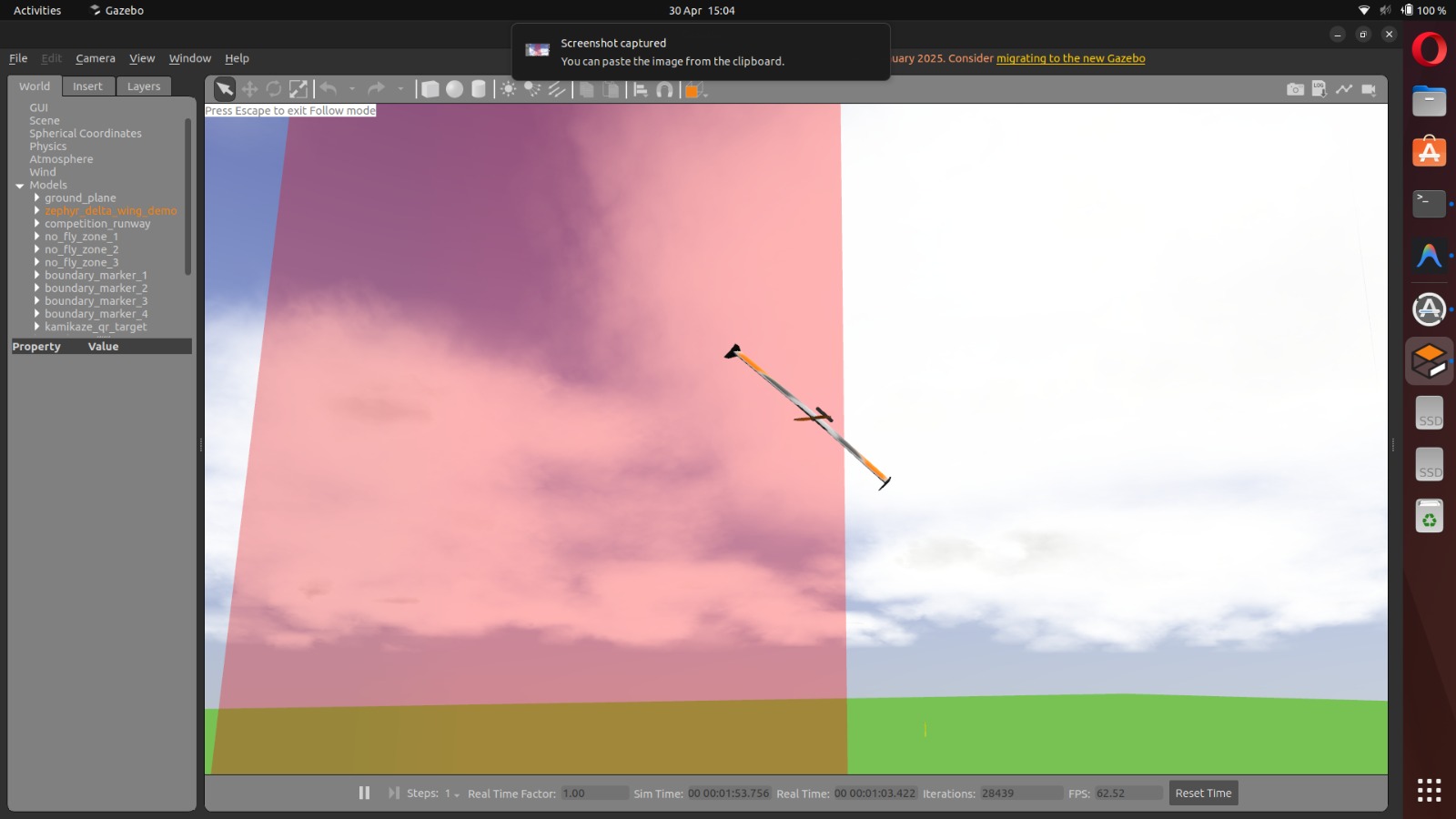
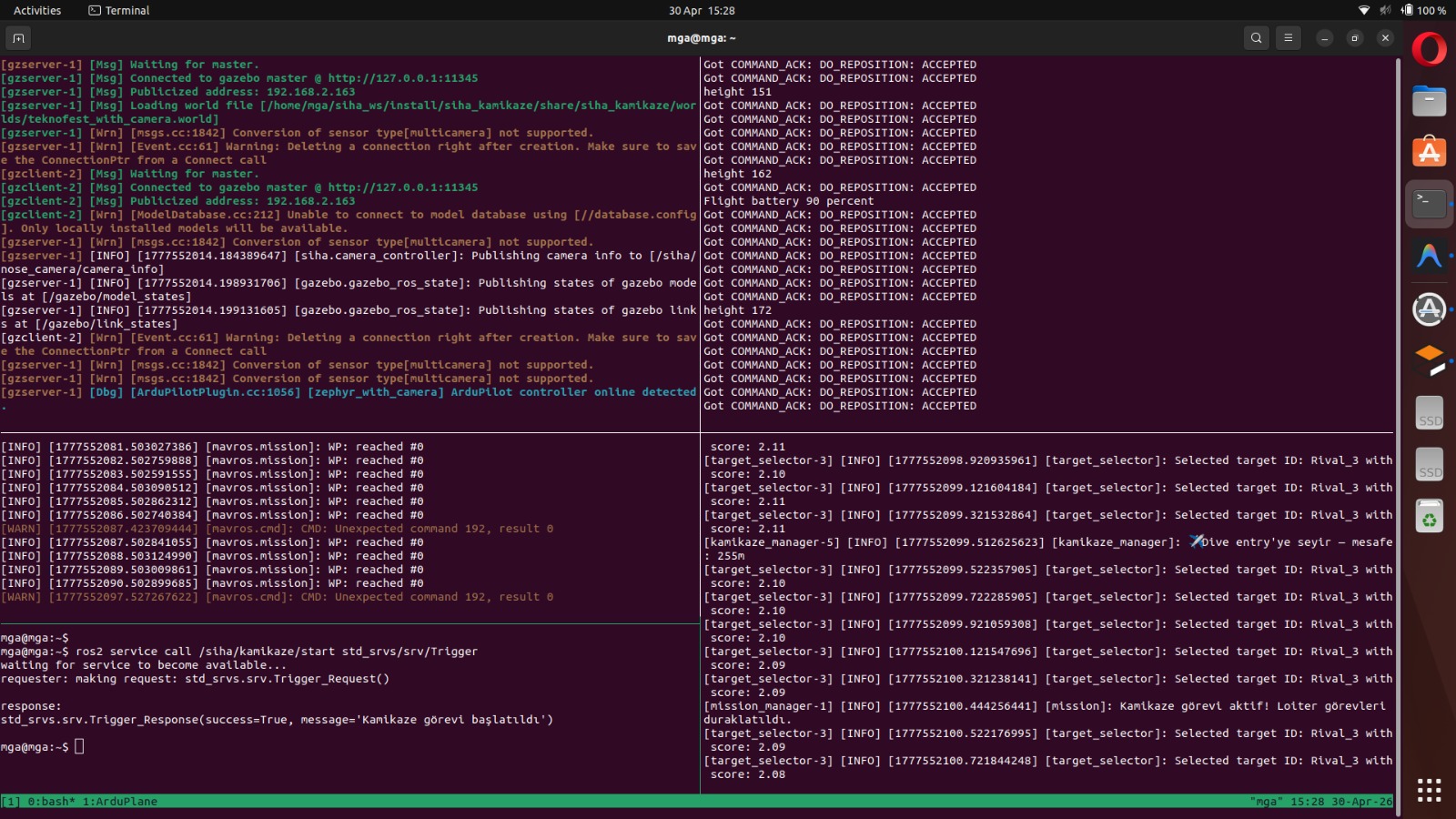
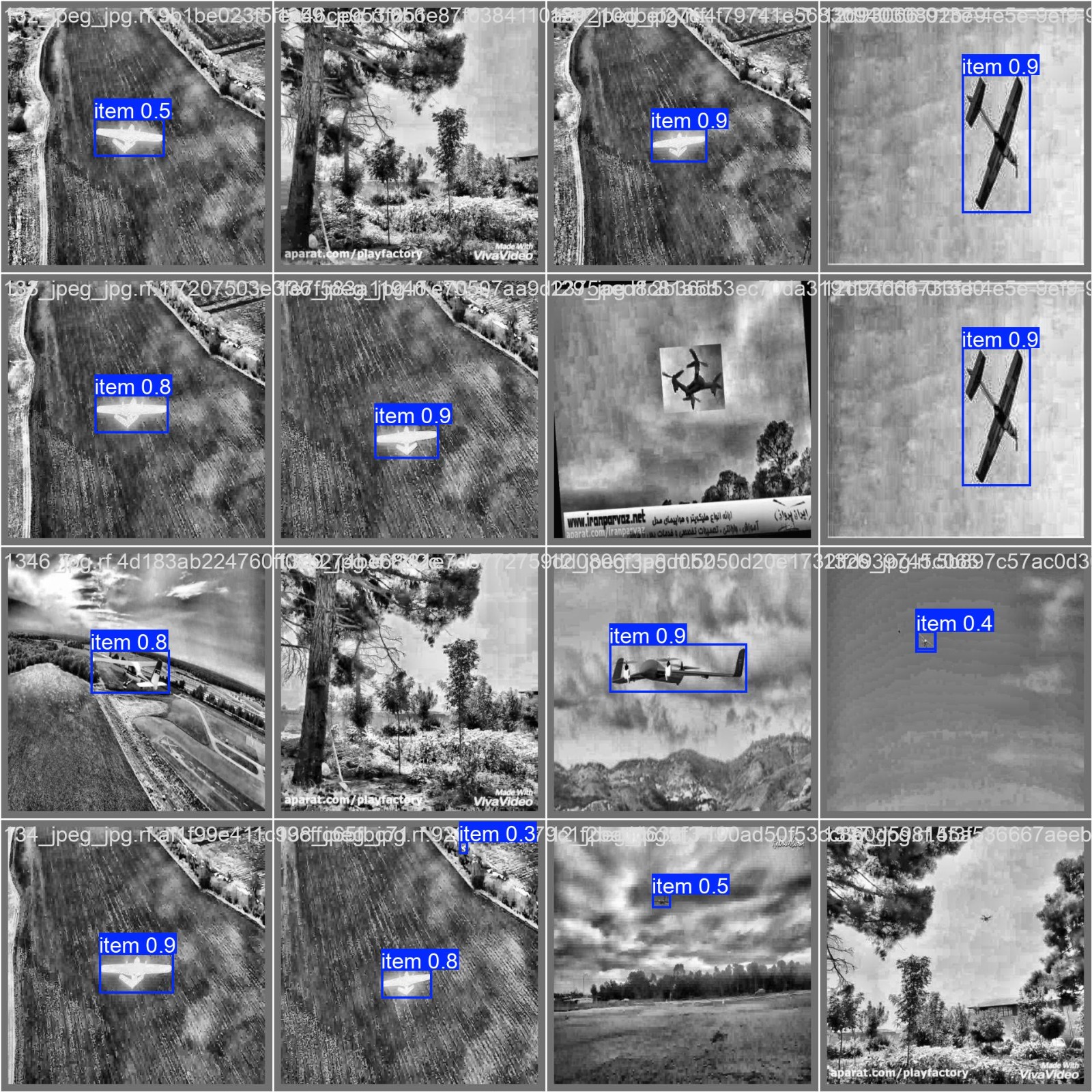
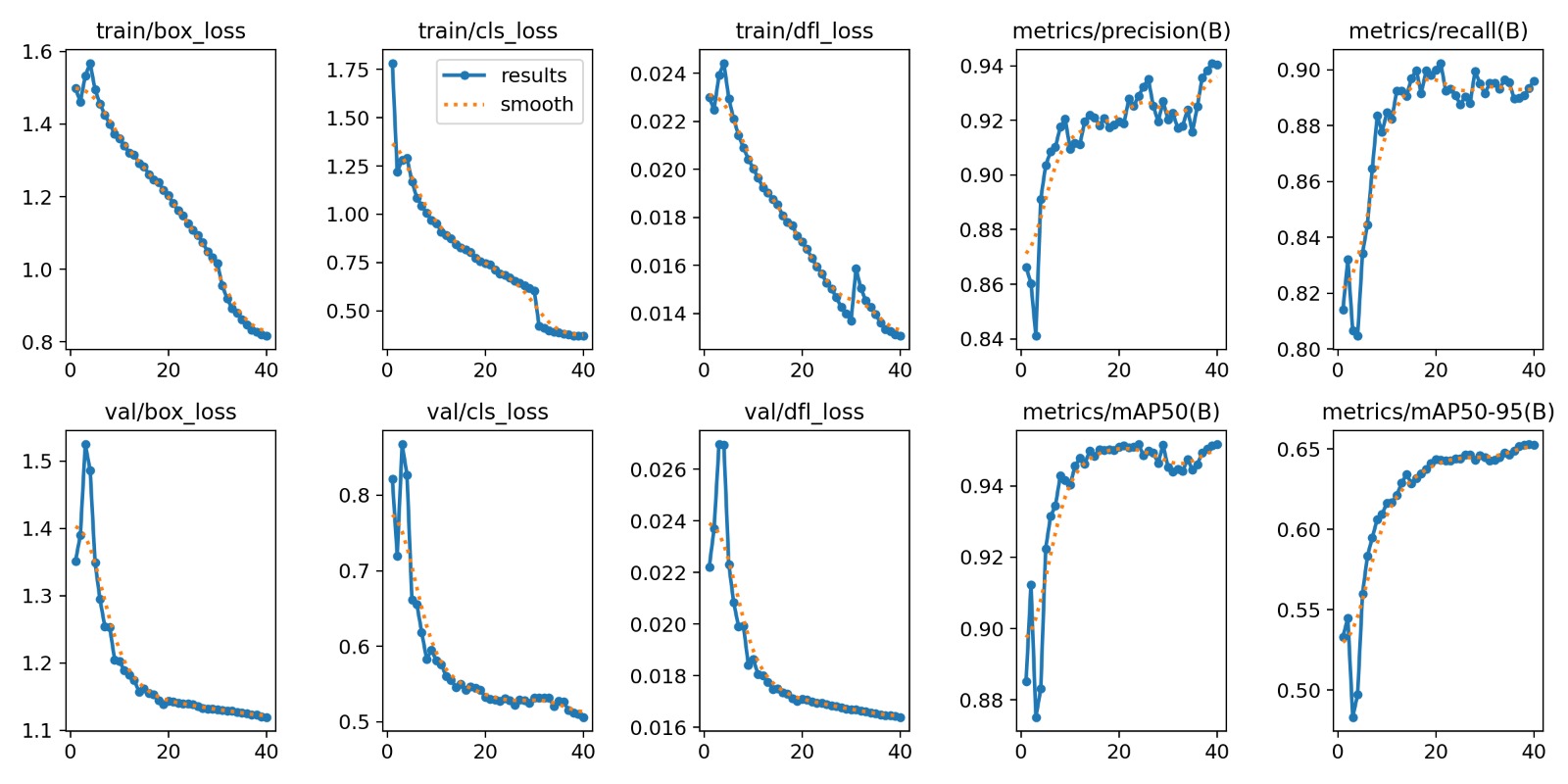
I designed the UAV's variable sweep wings, fuselage, and tail, running OpenVSP simulations for the initial sketches and conducting FEA analysis. On the software side, I created the autonomous algorithms in Gazebo using ROS2, and developed the computer vision stack using custom-trained YOLO models with extensive metric tracking.
The simulation, design, and AI models are complete, and we're currently building the first physical prototype.
- /01Variable sweep wing & fuselage designDone
- /02OpenVSP & FEA simulationsDone
- /03Gazebo ROS2 autonomy algorithmsDone
- /04CV upgrades (YOLOv26s training)Done
- /05Physical prototype buildIn Progress
- /06Flight testingQueued
Airframe Design & Analysis
CompletedDesigned the variable sweep wing, fuselage, and tail assembly. Validated through OpenVSP simulations and FEA structural analysis.
ROS2 & Gazebo Autonomy
CompletedCreated autonomous flight algorithms using ROS2 and simulated the environment in Gazebo for robust testing before physical deployment.
YOLO Computer Vision
CompletedDeveloped advanced CV algorithms for target tracking using YOLO models. Extensive model training and performance profiling.
Physical Build
In ProgressCurrently fabricating the first physical prototype incorporating the variable sweep wing mechanisms.

Eliminate human input.
Built for the TEKNOFEST 2025 Fighting UAV competition. The original platform handled detection, locking, dogfight maneuvering, and air defense evasion entirely on its own.
KUZGUN Year 1 was built for the TEKNOFEST 2025 Fighting UAV competition. The goal was to eliminate human dependency in air combat — the UAV handled target detection, locking, dogfight maneuvering, and air defense evasion completely on its own.
At 11.9 kg with a thrust-to-weight ratio of 1.26, it hit 106 km/h, took off in 5 meters, and flew for 35 minutes on cruise. The software stack ran YOLOv11m detection, ByteTrack multi-object tracking, and A* path planning — all on a Jetson Orin Nano with a triple-redundant comm link.
The autonomous stack.
Detection, combat maneuvering, threat evasion, and communication. Each system designed and integrated by me.
Autonomous Dogfighting
The UAV identifies rival aircraft, locks on autonomously to score points, and executes evasive maneuvers when targeted. No human input during combat — the system decides when to track, lock, and break away.
Computer Vision Stack
YOLOv11m for detection (51.5% mAP, benchmarked against SSD and Faster R-CNN), ByteTrack for multi-object tracking (best FPS and lowest ID switches vs SORT/DeepSORT), and Horn-Schunck optical flow for tracking targets that leave the camera frame.
Kamikaze & Precision Dive
Receives target coordinates from the competition server via QR code, flies to the point autonomously, checks for rivals, ensures altitude > 100m, then executes a -45° dive with an out-turned U-tail design to read QR codes at high speed using C++ OpenCV.
A* Air Defense Evasion
Pulls real-time coordinates of active air defense systems from the competition server and uses an A* Search Algorithm to calculate the safest flight path through defended airspace. Recalculates paths dynamically as new threats appear.
Triple-Redundant Comms
RFD868X for long-range telemetry (40 km range, FHSS). Quectel EC25-E LTE Cat 4 for 4G video streaming (720p H.264 via UDP). Ubiquiti Loco M5 Wi-Fi bridge (5 GHz, 5 km) as backup for both telemetry and video.
Hardware Integration
Pixhawk 2.4.8 flight controller running MAVLink, Jetson Orin Nano (8GB) for AI, RPi HQ Camera (12.3MP, 50-60 FPS at 1080p). Dual battery system — 12S 16Ah 60C for propulsion, separate 3S 4.2Ah for avionics — with DC-DC converters for clean power.
Detection in three layers.
YOLOv11m → ByteTrack → Horn-Schunck. When the target leaves the frame, optical flow predicts where it went.
- /01YOLOv11m Detection
Initial detection — benchmarked against SSD and Faster R-CNN. Best balance of accuracy (51.5% mAP) and speed on the Jetson's GPU.
- /02ByteTrack Tracking
Frame-to-frame multi-object tracking. Beat SORT and DeepSORT on both FPS and ID-switch rate — critical when a rival UAV is mid-maneuver.
- /03Horn-Schunck Optical Flow
When the target leaves the camera frame the system doesn't lose it — optical flow estimates where it went so the UAV can re-acquire on re-entry.
- /04PID Control Loop
Translates angular delta between UAV heading and target position into real-time flight commands — approach, lock, or break.

Numbers behind flight.
CFD-validated aerodynamics. Prototype in XPS before final carbon fiber build. Fail-safes engage on signal loss or battery below 20%.
Two years of
building combat UAVs.
Autonomous navigation, real-time computer vision, cryptographic comms, aerodynamic design, embedded AI, and now variable geometry — all for a competitive combat scenario. If you want to dig into the technical details, get in touch.