Autonomous systems, cryptographic protocols, production software, custom hardware. From a 30,000-dimensional chaotic key exchange to combat UAVs and websites running on my own home server.
Currently
Designing a portable FOC motor controller, evolving a fighter UAV with variable-sweep wings, and refining the lattice-field key exchange.
Hardware to software, math to fabrication. Tools I've actually shipped with — not a CV checklist.
Design & Fabrication
/01
Solidworks
AutoCAD
Ansys MotorCad
OpenVSP
Altium Designer
Proteus
PCB Design
Physical Prototyping
Hardware & Robotics
/02
ESP32 / RPi / Arduino
Jetson Orin / Nano
ROS
Ardupilot / Pixhawk
UHF RFID
WebSocket / GSM
E/E Engineering
Software & AI
/03
Python
C++
C#
JavaScript / TypeScript
OpenCV / YOLO
Machine Learning
TinyML
Pandas / Data Analysis
Cryptography & Math
/04
Chaos Theory
Coupled Map Lattices
SHA-256 / Hashing
RSA / ECDH
Post-Quantum Security
Nonlinear Dynamics
Web & Infrastructure
/05
Next.js / Node.js
.NET / Blazor
React / Three.js
React Native
PostgreSQL / SQLite
Home Server / Linux
Git / GitHub
Docker
/Always Learning
If it can be engineered, it can be learned.
— Working ethos
/03Career
Where I have worked.
A timeline of roles, contracts and self-directed research that led to the work shown below.
/01
2022 — Now
Founder
Sole Proprietorship
I run my own business — selling through Trendyol and Hepsiburada on the e-commerce side, and building and selling software on the other. Shipped full-stack apps to real clients (sports arena management, coffee shop platform), built Three.js websites, wrote a C++ image processing system a factory uses daily, set up internal comms networks. I run my own home server hosting the production apps I've shipped.
/02
2023 — Now
Independent Researcher
Cryptography & Autonomous Systems
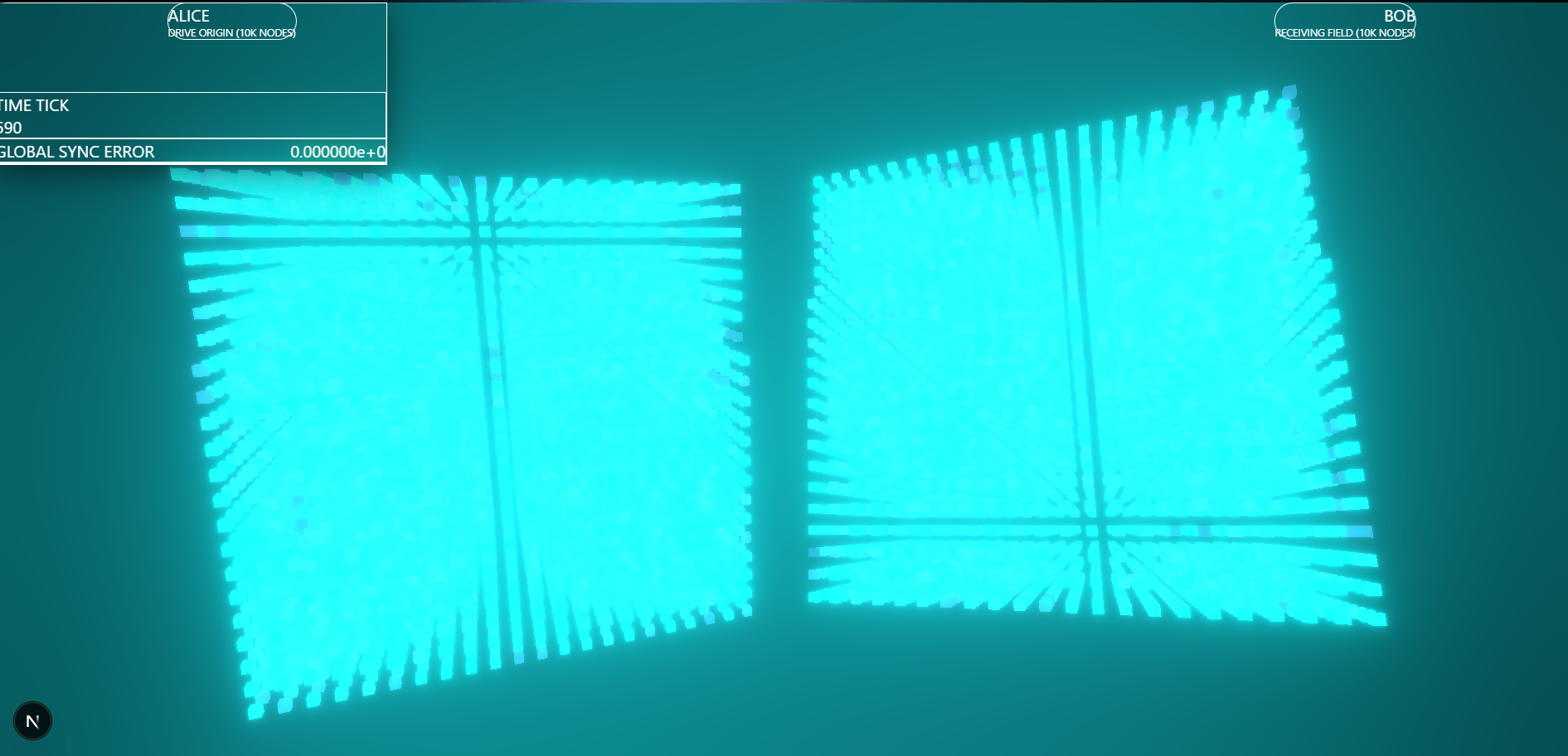
Designed a quantum-inspired key exchange protocol based on 30,000-dimensional chaotic attractors — immune to Shor's Algorithm. Built the physics engine, WebSocket sync layer, and Three.js visualizer from scratch. Also built autonomous CV pipelines (YOLOv11m, ByteTrack, Horn-Schunck) and encrypted comms (RSA/ECDH) for TEKNOFEST UAVs.
/03
2025
Hardware & Software Intern
Desapark Company
Worked with UHF RFID hardware (Impinj Speedway R420 readers) and helped build a .NET 6 Blazor web app for asset tracking. Got hands-on with both the physical reader setup and the full software stack.
/04
2023 - NOW
Community Lead
MPGK Student Community
Led the university's MPGK student community — organized events, coordinated between teams, and handled operations.
/04Selected Work
Things I have made.
Hardware, software, robots, protocols. A shortlist — full breakdowns linked from each entry.
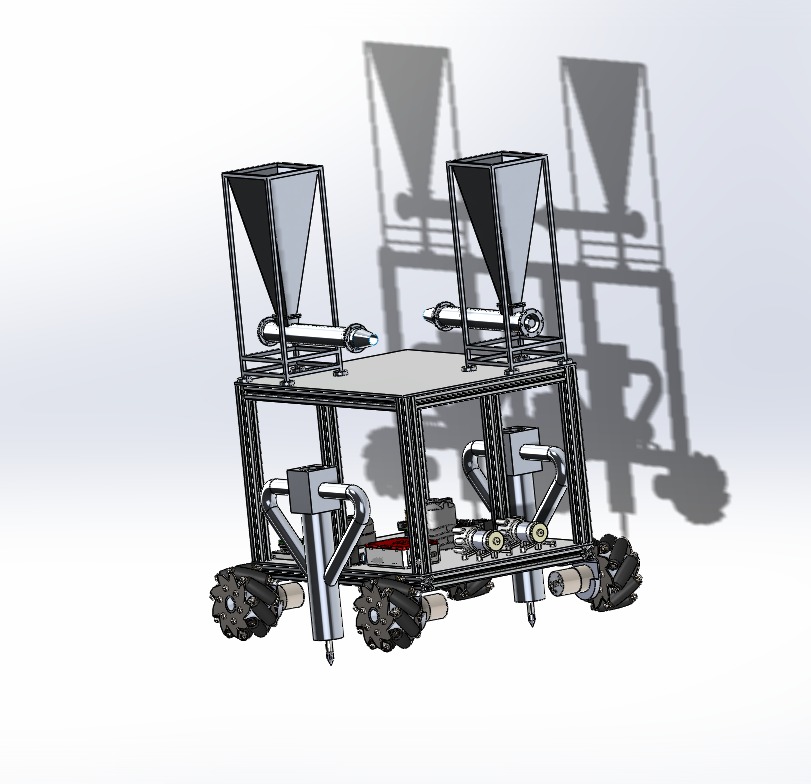
University team project — a 500kg tracked vehicle that drives itself. I handled the motor design in Ansys MotorCad, wrote the autonomous navigation in ROS, built the WiFi communication layer with ESP32 and WebSockets, and made a Next.js dashboard to control and monitor it remotely.
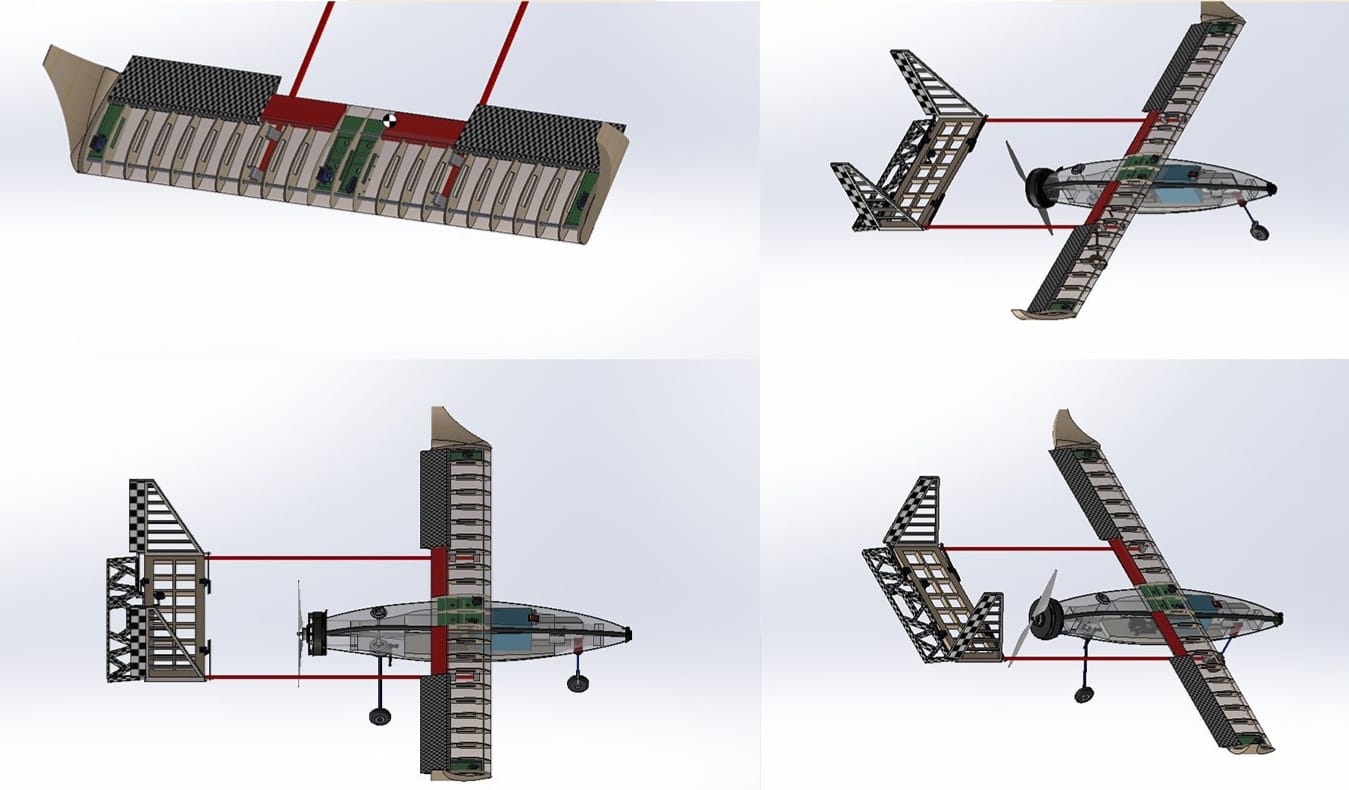
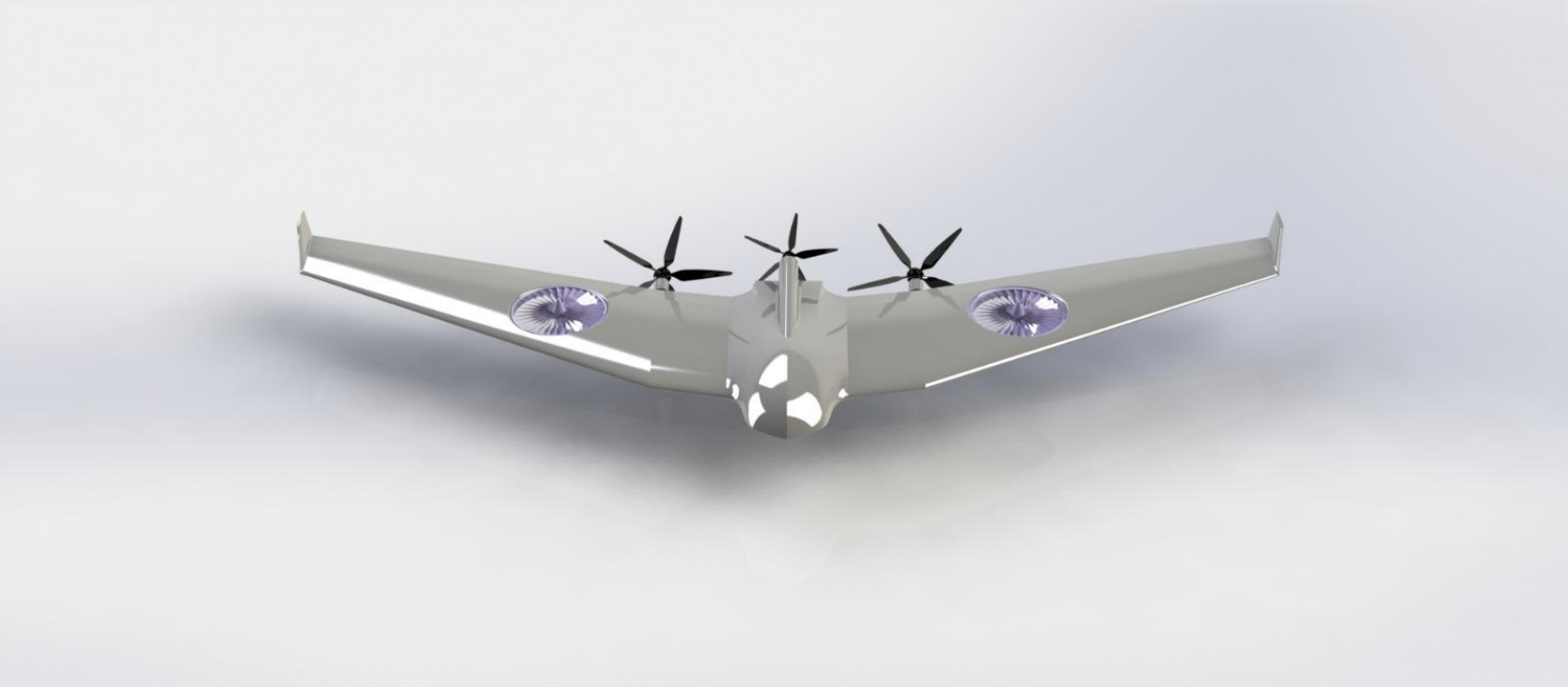
Two-year TEKNOFEST Fighting UAV project. Year 1: built an 11.9 kg autonomous combat UAV that does its own dogfighting with YOLOv11m detection, ByteTrack tracking, A* air defense evasion, 106 km/h top speed, and triple-redundant comms. Year 2: evolving the platform with variable sweep wings.
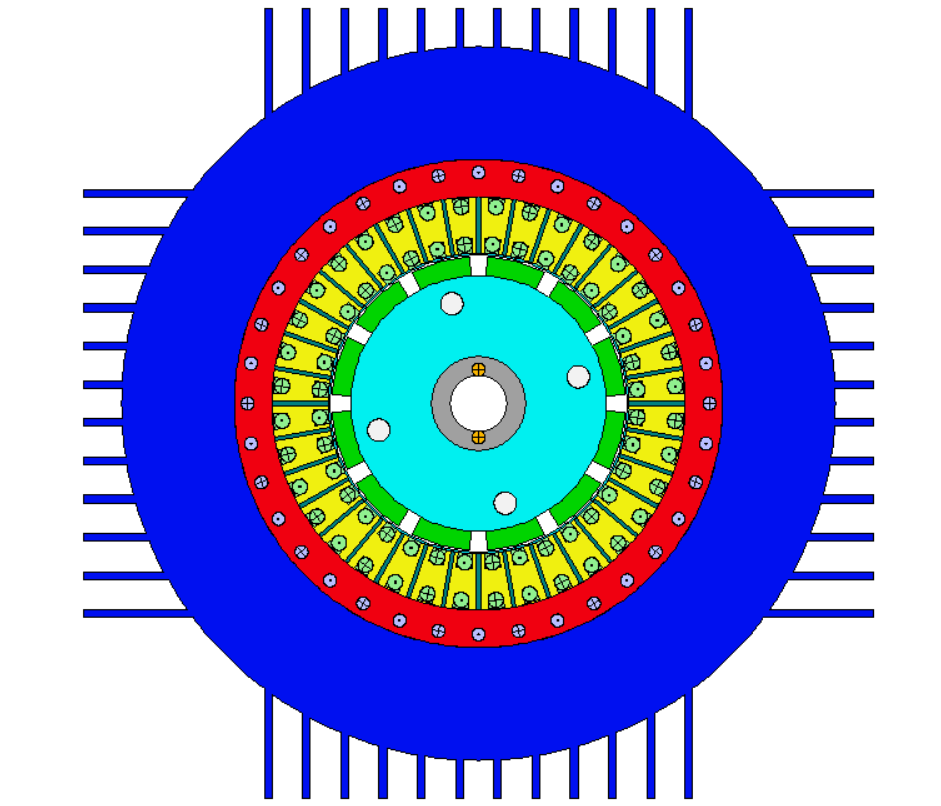
Building a Field-Oriented Control motor driver from scratch — the same technology Tesla uses in their drivetrains. Designed the PCB in Altium with SiC power transistors, wrote the Clarke/Park transform algorithms in C++, small enough to bolt onto any AC motor as a drop-in upgrade.
A quantum-inspired key exchange protocol I designed from scratch. Instead of primes and discrete logs, the security comes from 10,000 coupled chaotic oscillators evolving through a 30,000-dimensional phase space. Two parties synchronize their attractors over an open channel — the shared secret is derived, never transmitted. Immune to Shor's Algorithm.
A 23 kg VTOL surveillance UAV for TEKNOFEST. I designed the propulsion motors in Ansys, built the encrypted comm system (RSA + ECDH), wrote the YOLOv10 detection pipeline running on a Jetson Orin, and trained a TinyML model that dynamically optimizes motor power mid-flight.
Team project — an autonomous ground robot that plants and waters seeds on terrain too rough for conventional farming. I built the ROS navigation stack, integrated the LiDAR obstacle mapping, and connected everything to a custom mobile app for remote mission control via GSM.
Live in production. Some running on my own home server. Designed, built, delivered.
Live Website/01
Prodek İnşaat
Full website for a construction company with 35+ years in the industry. Built the entire site including a Three.js animated hero, project gallery, company history, and contact system. Designed, developed, and deployed.
Educational consultancy platform connecting students to universities worldwide. Built the entire site with a Three.js particle animation hero, consultation booking system, mission/vision pages, and responsive design.
Complete management system for a sports arena — member tracking, attendance analytics, revenue dashboards, scheduling, and payment monitoring. Built the full stack: React frontend, Node.js backend, PostgreSQL, mobile app. Deployed on my own home server.
Next.jsNode.jsPostgreSQLMobile AppSelf-hosted
Running on home server
Sold & Deployed/04
Aurora Coffee Shop
Full-stack application for a coffee shop — customer app, ordering system, business management dashboard. Built the mobile app, web frontend, Node.js backend, and PostgreSQL database. Also running on my home server.
Competition entry where we built a tech solution for tourism. Handled the software development side.
/02
TEKNOFEST
Air Defense Systems
Team competition — detection and tracking algorithms for an air defense system prototype.
/03
NLP / Deep Learning
TR-EN Neural Translator
Built a Turkish-English translation neural network from scratch — custom tokenizer, encoder-decoder, attention mechanism. No pre-trained models, everything trained from the ground up.
/04
Web Scraping / NLP
X (Twitter) Fake News Analyzer
Scrapes content from X, processes it through an NLP pipeline, classifies posts as real or fake news.
/05
Computer Vision / 3D
Dynamic 3D Gaussian Field Segmentation
Implemented dynamic segmentation on 3D Gaussian splatting fields — separating and tracking objects in real-time within a neural radiance representation.
/06
Data Analysis
Suntekstil Data Analysis
End-to-end data analysis project for a textile company. Cleaning, statistical analysis, trend visualization, and business insights using Python and Pandas.
/07
Embedded Systems
ESP32 Oscilloscope
Turned an ESP32 into a digital oscilloscope — ADC sampling, real-time waveform display, trigger modes, frequency measurement.
/08
AI / Health Tech
AI Health Tracking System
AI-integrated health tracking — collects user data, runs it through ML models for pattern detection and anomaly alerts.
HELLO
/05Contact
Let's build something real.
I'm looking for opportunities where I can work on robotics, autonomous systems, or anything that involves building things that actually work.